LLM 并行-Switch Transformers 论文详解
Categories: LLM_Infer_Optimize
一 背景知识
1.1 All-to-All 通信
llm 推理部署中的 All-to-All 通信包括:Dispatch 和 Combine 阶段。
Dispatch(分发阶段):将本地数据分片发送给其他节点(例如张量的不同维度分片)。Combine(聚合阶段):从所有节点收集分片并重组为完整数据。
1.2 MoE 专家并行原理
1,概述:
- 专家并行是在分布式学习中专门针对 MoE 模块场景的并行策略,其主要思想就是将不同专家放在不同计算节点上进行并行计算。
- 专家并行与之前所有的并行相比,最大的不同在于,输入数据需要通过一个动态的路由选择机制分发给相应专家,此处会涉及到一个所有节点上的数据重分配的动作(dispatch),然后在所有专家处理完成后,又需要将分散在不同节点上的数据按原来的次序整合起来(combine)。
- 对于专家并行,通信发生在每一个 MoE 模块之前和之后,即 dispatch 和 combine 操作,单次通信数据量较大且可能动态变化,通信较频繁。
2,核心思想:
- 动态专家激活:MoE 模型中,每个输入 token 仅被路由到 num_experts_per_tok个专家(如DeepSeek R1 每层激活 8/256 个专家),其他专家处于空闲状态。
3,关键挑战和优化:
- 负载不均衡:高频专家导致部分 GPU 过载(如负载波动达300%)。【解决办法:EPLB 优化: 存放冗余专家】
- 通信开销:跨节点通信(如 RDMA)延迟高。【解决办法:高度优化的通信库 DeepEP, 通信和计算重叠】
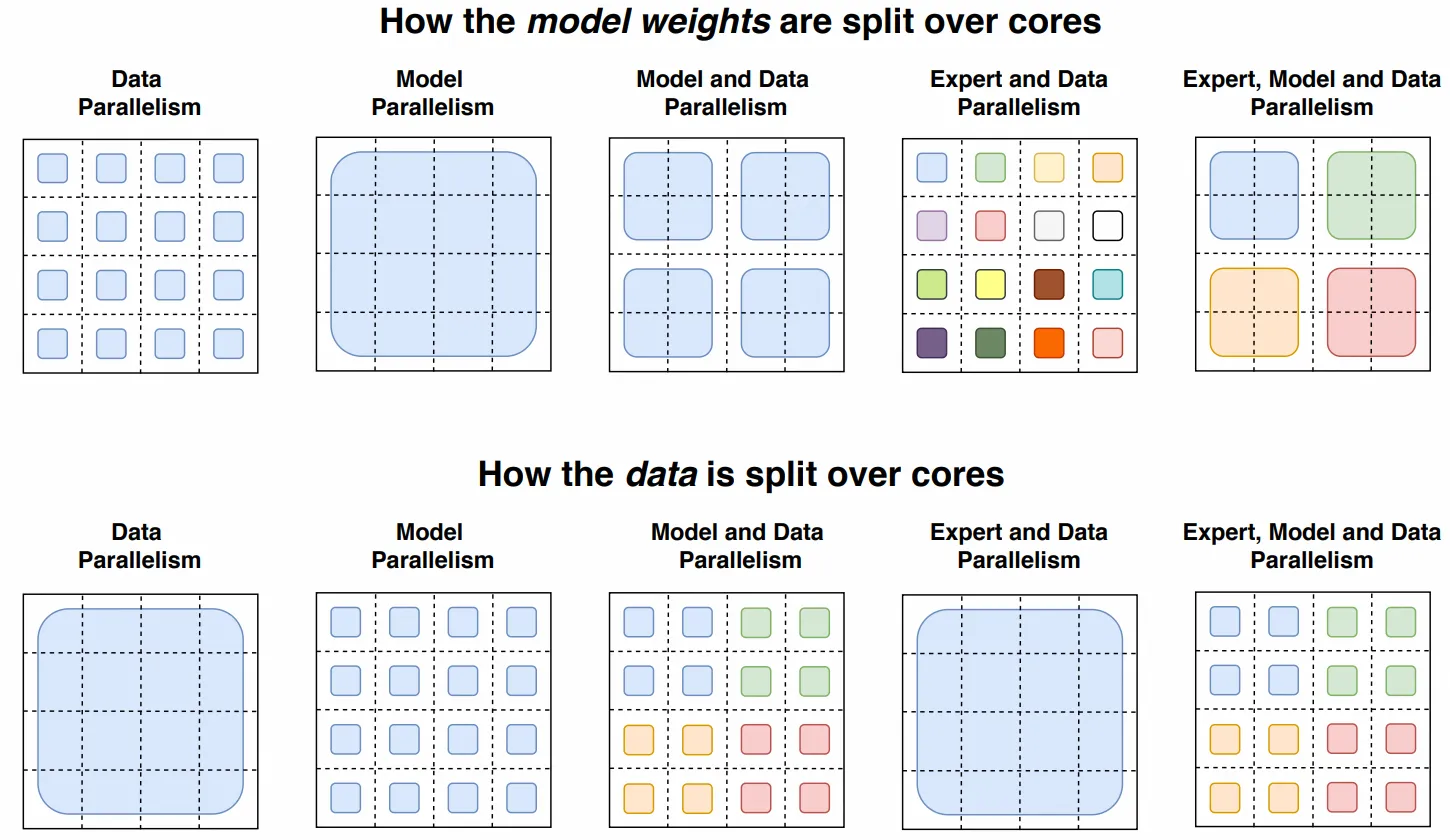
1.3 DeepSpeed MoE 并行策略
DeepSpeed MoE 支持五种不同形式的并行,并同时利用 GPU 和 CPU 内存。其灵活的设计使用户能够混合不同类型的流行并行技术,如下表所示。
| 简称 | 灵活并行配置 | 优势 |
|---|---|---|
| E | 专家并行 | 通过增加专家数量来扩展模型大小 |
| E + D | 专家 + 数据并行 | 通过扩展到多个数据并行组来加速训练吞吐量 |
| E + Z | 专家 + ZeRO 驱动的数据并行 | 分割非专家参数以支持更大的基础模型 |
| E + D + M | 专家 + 数据 + 模型并行 | 支持巨大的隐藏层大小,以及比 E+Z 更大的基础模型 |
| E + D + Z | 专家 + 数据 + ZeRO 驱动的数据并行 | 支持巨大的隐藏层大小,以及比 E+Z 更大的基础模型 |
| E + Z-Off + M | 专家 + ZeRO-Offload + 模型并行 | 在有限的 GPU 数量下,为大型 MoE 模型利用 GPU 和 CPU 内存 |
二 MoE 负载不均衡的优化
- 设置专家容量 (Expert Capacity):这是这段代码最核心的概念。在 TPU 这样的硬件上,为了效率最大化,计算图(包括张量的形状)在编译时必须是静态的。你不能动态地决定一个专家今天处理 100 个 tokens,明天处理 120 个。因此,每个专家都被分配了一个固定大小的缓冲区,这就是它的“容量”。如果发送给某个专家的 tokens 数量超过了其容量,多余的 tokens 就会被丢弃 (dropped)。
- 负载均衡损失 (Load Balancing Loss):由于存在 token 丢弃的风险,我们不希望路由器把所有 tokens 都发送给少数几个“热门”专家。因此,需要一个辅助的损失函数来鼓励路由器尽可能均匀地将 tokens 分配给所有专家。
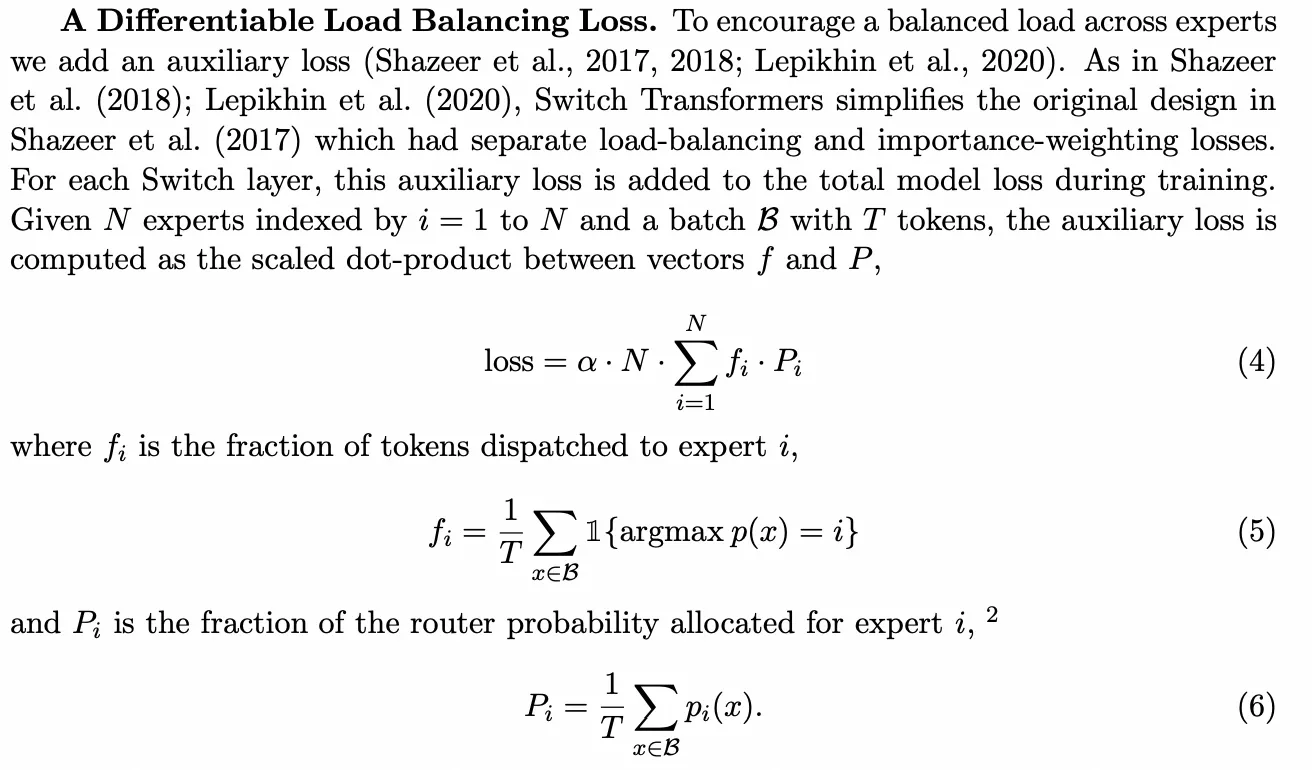
负载均衡损失优化的完整公式如上图所示。
公式4: 负载均衡损失
\[\text{loss} = \alpha \cdot N \cdot \sum_{i=1}^{N} f_i \cdot P_i\]- $f_i$:实际分配到专家 $i$ 的 token 比例(公式5)
- 计算方式:统计 batch 内被路由到专家 i 的 token 数量,除以总 token 数 T 。
- 例如:若 100 个 token 中有 30 个分配给专家 1,则 $f_1 = 0.3$。
- $P_i$:路由器对专家 $i$ 分配的概率均值(公式6)
- 计算方式:对 batch 内所有 token 的路由概率 $p_i(x)$ 取平均。
- 例如:若所有 token 对专家 1 的平均概率为 0.2,则 $P_1 = 0.2$ 。
- $\alpha$:超参数,控制损失权重, 文中设为 $10^{-2}$。
- $N$:专家总数,用于抵消专家数量对损失值的影响。
关键设计思想
- 目标:最小化该损失会迫使 $f_i$ 和 $P_i$ 趋近于 $\frac{1}{N}$(即均匀分配)。
- 当完全均衡时:$f_i = P_i = \frac{1}{N}$,此时损失值为 $\alpha \cdot N \cdot \sum \frac{1}{N^2} = \alpha$与 $N$ 无关。
- 可微分性:仅 $P_i$ 依赖可微的路由概率,而 $f_i$ 不可微(因
argmax是离散操作),但整体损失仍可梯度传播。
公式5:实际分配比例 $f_i$
\[f_i = \frac{1}{T} \sum_{x \in B} 1 {\text{argmax } p(x) = i}\]- ($ 1{\cdot} $): 指示函数,当token $x$被分配给专家$i$时值为1,否则为0。
- 物理意义:直接统计各专家的真实负载比例。
公式6:路由概率比例 $P_i$
\[P_i = \frac{1}{T} \sum_{x \in B} p_i(x)\]- $p_i(x)$:token $x$ 分配给专家 $i$ 的软概率(由路由器输出)。
- 物理意义:量化路由器对专家 $i$ 的”偏好程度”。
为什么该损失能促进负载均衡
- 数学性质:当 $f_i$ 和 $P_i$ 均等于 $\frac{1}{N}$ 时,损失达到最小值 $\alpha$。
- 反向传播作用:
- 若某专家 $i$ 的 $f_i$ 过高(接收过多 token),损失函数会通过 $P_i$ 调整路由概率,减少对该专家的偏好。
- 反之,若 $f_i$ 过低,则增加路由概率。
举个例子,假设 $N=2$ 个专家,batch 内 $T=4$ 个token:
| Token $x$ | 专家1概率 $p_1(x)$ | 专家2概率 $p_2(x)$ | 实际分配 |
|---|---|---|---|
| $x_1$ | 0.7 | 0.3 | 专家1 |
| $x_2$ | 0.6 | 0.4 | 专家1 |
| $x_3$ | 0.4 | 0.6 | 专家2 |
| $x_4$ | 0.3 | 0.7 | 专家2 |
- 计算:
- $f_1 = \frac{2}{4} = 0.5$, $f_2 = 0.5$
- $P_1 = \frac{0.7+0.6+0.4+0.3}{4} = 0.5$, $P_2 = 0.5$
- 损失值:$\alpha \cdot 2 \cdot (0.5 \cdot 0.5 + 0.5 \cdot 0.5) = \alpha$(均衡状态)
三 MoE 并行策略
llm 并行推理时:数据并行 + 模型并行(张量并行),GPU 数量 = dp_size * tp_size。
3.1 数据并行 + 张量并行
每个 gpu 设备负责: $\text{num_tokens} / \text{dp_size}$ 个 tokens,以及 $\text{d_model} / m$、$\text{d_ff} / m$ 的权重和中间激活。 在前向传播和反向传播过程中,每个核心通过全归约操作传输大小为: $[\text{num_tokens} / \text{dp_size},\text{d_model}]$ 的张量。
3.2 数据并行 + 专家并行
首先,定义文中的变量:
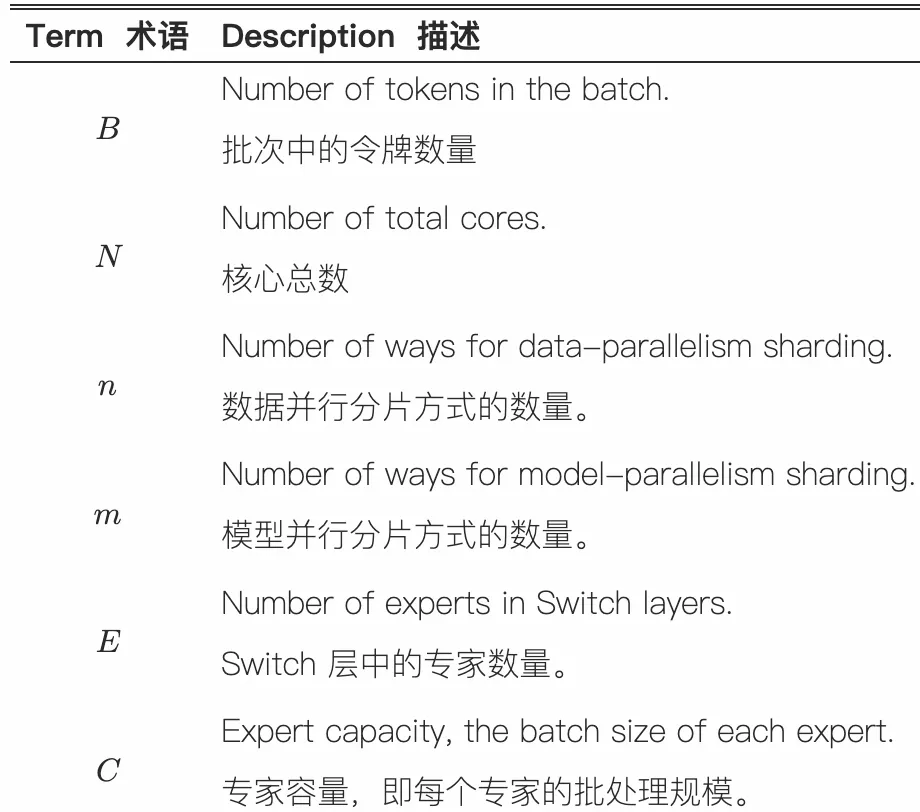
n: 计算核心的数量(例如 GPU 或 TPU 核心的数量)。B: 一个批次中 Token 的总数 (Total Batch Size)。B/n: 每个核心处理的 Token 数量。E: 模型中专家的总数。C: 每个专家的容量 (Capacity),即每个专家最多能处理的 Token 数量。d_model: 模型的隐藏层维度(Token 的向量表示维度)。
流程分解
第一步:本地路由 (Local Routing)
Switch Transformer 的一个巧妙设计是:如果你有 n 个计算核心(如 GPU),那么你就有 n 个专家,每个核心恰好负责一个专家。
“Switch Transformers will allocate all of their cores to the data partitioning dimension
n… For each token per core a router locally computes assignments to the experts.”“Switch Transformers 会将所有计算核心分配至数据分区维度
n… 每个核心上的令牌会由本地路由器计算专家分配方案。”
- 初始状态:系统处于数据并行模式。有 n 个计算核心(如 GPU),就有 n 个专家,每个核心负责一个专家,处理
B/n个 tokens。 - 本地计算:在每个核心上,路由器独立地为它自己负责的
B/n个 tokens 计算出它们应该去哪个专家。 - 输出:路由器的计算结果是一个巨大的、稀疏的二进制矩阵,我们称之为
dispatch_tensor。对于单个核心来说,它的形状是[B/n, E, C]。当所有n个核心组合起来时,就是文中的[n, B/n, E, C]。这个矩阵标记了每个本地 token 应该去哪个专家(E维度)的哪个容量位置(C维度)。
第二步:本地收集 (Local Gather via einsum)
“This binary matrix is then used to do a gather via matrix multiplication with the input tensor… einsum(…)”
“随后通过该二进制矩阵与输入张量…的矩阵乘法来完成数据收集操作。”
- 操作:这是一个非常聪明的步骤。通过
einsum(本质上是矩阵乘法),dispatch_tensor被用来从原始的 token 列表[n, B/n, d_model]中“抓取”和“排序” tokens。 einsum详解:einsum([n, B/n, d_model], [n, B/n, E, C], dimension=[B/n])- 输入1:
[n, B/n, d_model]- 每个核心上的原始 token 数据。 - 输入2:
[n, B/n, E, C]- 本地路由决策(调度矩阵)。 - 操作: 它在
B/n这个维度上进行收缩(矩阵乘法)。可以理解为,对于每个核心,它都在说:“按照我的调度矩阵,把这B/n个 tokens 重新排列,放进E个专家的C个容量槽里。”
- 结果:
einsum的输出张量形状为[n, E, C, d_model]。- 含义:此时,在每个核心上,tokens 已经根据它们将要去的专家被分好组了。例如,在核心0上,有一个形状为
[E, C, d_model]的张量,其中第一个切片[0, C, d_model]是所有起源于核心0并且要去专家0的 tokens,第二个切片是起源于核心0要去专家1的 tokens,依此类推。 - 关键问题:虽然 tokens 已经按专家分组,但它们仍然在错误的物理核心上。例如,要去专家5的 tokens 现在可能还分散在核心0、核心1、核心2…上。
- 含义:此时,在每个核心上,tokens 已经根据它们将要去的专家被分好组了。例如,在核心0上,有一个形状为
第三步:全局交换 (Global Shuffle via All-to-All)
“Because each core has its own expert, we do an all-to-all communication… to now shard the E-dimension instead of the n-dimension.”
“由于每个计算核心拥有独立的专家模块,我们需执行…的全交换通信,将分片维度从
n维度转为E维度。”
- 模式切换:这是从数据并行切换到专家并行的魔法发生的地方。我们现在假定,物理核心 $i$ 负责运行专家 $i$。
All-to-All操作:- 发送:核心
i会把它在上一步中收集好的、要去往专家j的那一包 tokens ([j, C, d_model]) 发送给核心j。它会对所有j都做这个操作。 - 接收:同时,核心
i会从所有其他核心j那里,接收它们发送过来的、要去往专家i的那一包 tokens。
- 发送:核心
- 最终状态:经过
All-to-All之后,在核心i上,现在汇集了来自所有核心的、但目标都是专家i的 tokens。此时,核心i就可以用它负责的专家i的权重对这些 tokens 进行计算了。数据的分片方式从按n(数据并行)变成了按E(专家并行)。
实例分析
假设我们有以下配置:
n=2(2个GPU: GPU0, GPU1)E=2(2个专家: E0, E1),我们规定 GPU0 负责 E0,GPU1 负责 E1。B=8(总共8个tokens: t0-t7)B/n=4(每个GPU处理4个tokens)C=3(每个专家容量为3)d_model=...(维度不影响逻辑)
1. 初始状态 (数据并行)
- GPU0 持有数据:
[t0, t1, t2, t3] - GPU1 持有数据:
[t4, t5, t6, t7]
2. 本地路由 & 本地收集 (einsum)
- GPU0 上的路由器决定:
- t0 -> E1
- t1 -> E0
- t2 -> E1
- t3 -> E0
经过einsum,GPU0 上的张量[E, C, d_model]变为: - 发往 E0 的包:
[t1, t3, <pad>](容量3,填满2个) - 发往 E1 的包:
[t0, t2, <pad>](容量3,填满2个)
- GPU1 上的路由器决定:
- t4 -> E1
- t5 -> E1 (但 E1 容量已满,假设 t5 被丢弃)
- t6 -> E0
- t7 -> E1
经过einsum,GPU1 上的张量[E, C, d_model]变为: - 发往 E0 的包:
[t6, <pad>, <pad>] - 发往 E1 的包:
[t4, t7, <pad>](t5 被丢弃了)
3. 全局交换 (All-to-All)
- GPU0:
- 发送 去往 E1 的包
[t0, t2, <pad>]给 GPU1。 - 保留 去往 E0 的包
[t1, t3, <pad>]。 - 接收 来自 GPU1 的、去往 E0 的包
[t6, <pad>, <pad>]。
- 发送 去往 E1 的包
- GPU1:
- 发送 去往 E0 的包
[t6, <pad>, <pad>]给 GPU0。 - 保留 去往 E1 的包
[t4, t7, <pad>]。 - 接收 来自 GPU0 的、去往 E1 的包
[t0, t2, <pad>]。
- 发送 去往 E0 的包
4. 最终状态 (专家并行)
- GPU0 上现在的数据是 所有要去 E0 的 tokens:
[t1, t3, t6]。GPU0 现在可以调用 专家E0 进行计算。 - GPU1 上现在的数据是 所有要去 E1 的 tokens:
[t0, t2, t4, t7](注意,这里的数量超过了容量C,说明我的例子中 t7 也应该被丢弃,一个更真实的场景是容量会被严格遵守)。一个更正的例子是 GPU1 的包是[t4, t7, <pad>],接收 GPU0 的包[t0, t2, <pad>]后,最终送入 E1 计算的是[t4, t7, t0],t2被丢弃。
计算完成后,会再有一次 All-to-All 将结果发送回它们原始的 token 位置。
3.3 专家、数据、张量并行
一个 gpu 的显存是有限的,可能不足以存放下所有 experts 的权重,因此需要增加 m(张量并行) 。但由于核心(GPU)数量 N 和 N=n×m 是固定的,我们必须减少 n ,这迫使采用更小的批处理规模(以保持每个核心处理的令牌数恒定)。 当结合模型并行与专家并行时,我们将面临两种通信开销:一是将令牌路由至对应专家的全对全通信,二是模型并行内部的全局规约通信。当同时采用这三种方法时,平衡 FLOPS、通信开销与单核内存变得极为复杂,最佳映射方案需通过实验确定。