vit 论文速读
Categories: Transformer
简介
META 于 2020 年发表 DETR 论文,紧跟着谷歌从特征编码的角度深入研究 Transformer 在视觉表征层面的学习能力,进而提出了 Vision Transformer (ViT) 模型。模型结构比较简单,是自注意力机制和前馈网络的直接堆叠,只使用到了 Transformer 中的 encoder 结构。
ViT 原论文中最核心的结论是,当拥有足够多的数据进行预训练的时候,ViT 的表现就会超过 CNN,突破 transformer 缺少归纳偏置(一种先验知识)的限制,可以在下游任务中获得较好的迁移效果。
归纳偏置(inductive bias),是一种先验知识,即提前做好的假设。CNN 具有两种归纳偏置:
- 局部性(locality/two-dimensional neighborhood structure),即图片上相邻的区域具有相似的特征;
- 平移不变形(translation equivariance), $f(g(x)) = g(f(x))$,其中 $g$ 代表卷积操作,$f$ 代表平移操作。
ViT 模型结构
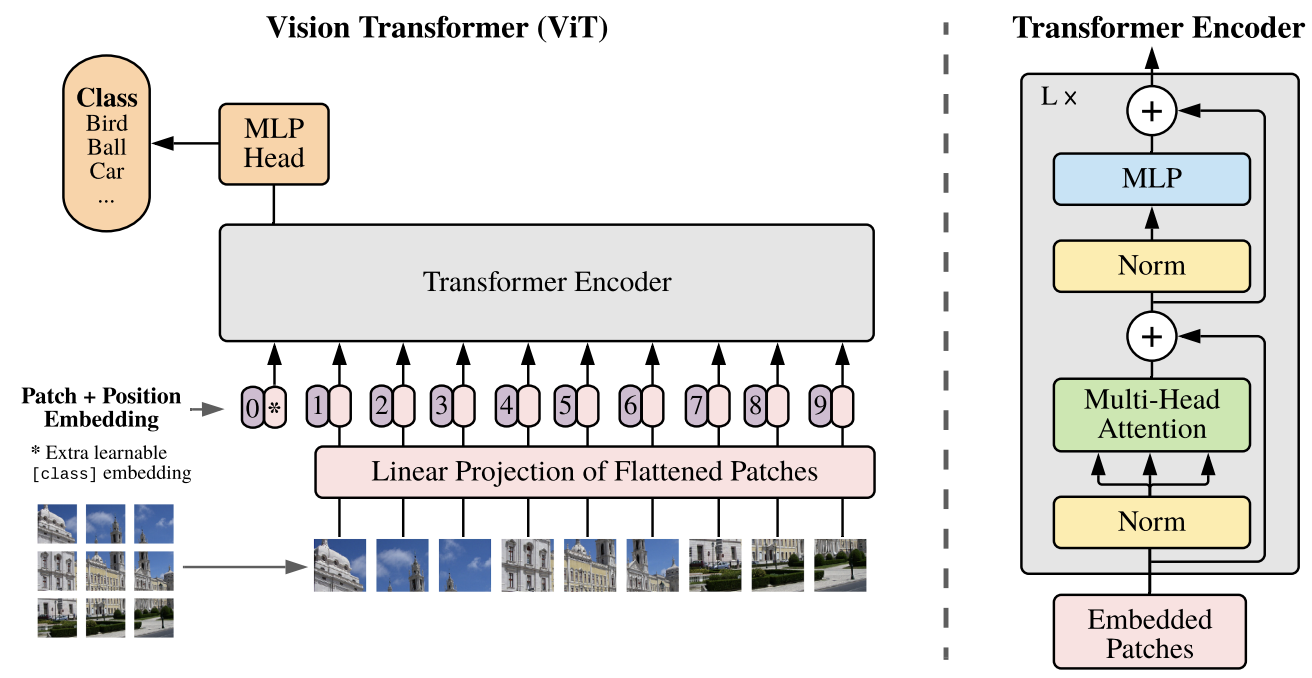
模型概述:作者将输入的图像划分为固定大小的图像块,对每个图像块都进行线性嵌入,添加位置嵌入,并将生成的向量序列输入到标准的 Transformer 编码器中。为了进行分类,参考前人经验,使用标准方法,即在序列中添加一个额外的可学习“分类令牌”。
ViT block 组成
一个 ViT block 由以下 5 部分组成:
Patch Embeddings: 将输入图像划分为固定大小的补丁(patch),每个 patch 被展平为一个向量,并通过一个线性投影层(相当于将 patch 转换为 token embedding),嵌入的维度通常设为 768。Position Embeddings: 添加位置编码(positional embedding),因为 Transformer 本身不具有处理图像空间信息的能力,位置编码能帮助模型了解每个 patch 在图像中的位置。Transformer Encoder: 与 NLP 中的 Transformer 类似,包括多个堆叠的 Transformer blocks。每个 block 包含以下两部分:- Multi-Head Self Attention (MHSA): 允许每个 patch 关注其他 patch 的信息。
- Feed-Forward Network (FFN): 一个两层的全连接网络,其中使用新的激活函数(
GELU)。
Classification Head: 将 Transformer Encoder 的输出(通常是第一个 token)传入全连接层(MLP Head)以生成最终的分类输出。Layer Normalization and Skip Connections: 在每个子层之后使用层归一化(Layer Normalization)和残差连接(skip connections)。
输入切分为多个 path
ViT 将输入图片分为多个 patch(16x16),再将每个 patch 投影为固定长度的向量送入 Transformer,后续 encoder 的操作和原始 Transformer 中完全相同。如果是对于图片分类问题,则会在输入序列中加入一个特殊的 token,该 token 对应的输出即为最后的预测类别。
举个例子来理解 patch embedding 过程: 假设输入图片大小为 $224 \times224$,patch 大小为 $16\times 16$,则:
- 每张图片都会生成 $(224\times224)/(16\times16) = 196$ 个 patch,类似于 transformer 模型的输入序列长度为 196;
- 每个 patch 维度大小 = $16\times 16\times 3 = 768$,类似于每个
token映射成的向量长度为 768; - 输入序列会加上一个特殊令牌
cls,最终经过切分 patch 后的输入图像张量形状为 = $197\times 768$(一共有197个 token)。线性投影层的维度为 $768\times N (N=768)$,因此输入通过线性投影层之后的维度依然为 $197\times 768$。
到此,我们详细的解析了 patch embedding 过程,这些操作全部被写在名为 PatchEmbed 的模块中,其具体的实现如下所示:
class PatchEmbed(nn.Module):
"""
Image --> Patch Embedding --> Linear Proj --> Pos Embedding
Image size -> [224,224,3]
Patch size -> 16*16
Patch num -> (224^2)/(16^2)=196
Patch dim -> 16*16*3 =768
Patch Embedding: [224,224,3] -> [196,768]
Linear Proj: [196,768] -> [196,768]
Positional Embedding: [197,768] -> [196,768]
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
"""
Args:
img_size: 默认参数224
patch_size: 默认参数是16
in_c: 输入的通道数
embed_dim: 16*16*3 = 768
norm_layer: 是否使用norm层,默认为否
"""
super().__init__()
img_size = (img_size, img_size) # -> img_size = (224,224)
patch_size = (patch_size, patch_size) # -> patch_size = (16,16)
self.img_size = img_size # -> (224,224)
self.patch_size = patch_size # -> (16,16)
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1]) # -> grid_size = (14,14)
self.num_patches = self.grid_size[0] * self.grid_size[1] # -> num_patches = 196
# Patch+linear proj的这个操作 [224,224,3] --> [14,14,768]
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
# 判断是否有norm_layer层,要是没有不改变输入
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
# 计算各个维度的大小
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW], flatten(2)代表的是从2位置开始展开
# eg: [1,3,224,224] --> [1,768,14,14] -flatten->[1,768,196]
# transpose: [B, C, HW] -> [B, HW, C]
# eg: [1,768,196] -transpose-> [1,196,768]
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
代码实现
代码来源-github 仓库链接:
import torch
from torch import nn
from einops import rearrange, repeat
from einops.layers.torch import Rearrange
# helpers
def pair(t):
return t if isinstance(t, tuple) else (t, t)
# classes
class FeedForward(nn.Module):
def __init__(self, dim, hidden_dim, dropout = 0.):
super().__init__()
self.net = nn.Sequential(
nn.LayerNorm(dim),
nn.Linear(dim, hidden_dim),
nn.GELU(),
nn.Dropout(dropout),
nn.Linear(hidden_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x):
return self.net(x)
class Attention(nn.Module):
def __init__(self, dim, heads = 8, dim_head = 64, dropout = 0.):
super().__init__()
inner_dim = dim_head * heads
project_out = not (heads == 1 and dim_head == dim)
self.heads = heads
self.scale = dim_head ** -0.5
self.norm = nn.LayerNorm(dim)
self.attend = nn.Softmax(dim = -1)
self.dropout = nn.Dropout(dropout)
self.to_qkv = nn.Linear(dim, inner_dim * 3, bias = False)
self.to_out = nn.Sequential(
nn.Linear(inner_dim, dim),
nn.Dropout(dropout)
) if project_out else nn.Identity()
def forward(self, x):
x = self.norm(x)
qkv = self.to_qkv(x).chunk(3, dim = -1)
q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> b h n d', h = self.heads), qkv)
dots = torch.matmul(q, k.transpose(-1, -2)) * self.scale
attn = self.attend(dots)
attn = self.dropout(attn)
out = torch.matmul(attn, v)
out = rearrange(out, 'b h n d -> b n (h d)')
return self.to_out(out)
class Transformer(nn.Module):
def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout = 0.):
super().__init__()
self.norm = nn.LayerNorm(dim)
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(nn.ModuleList([
Attention(dim, heads = heads, dim_head = dim_head, dropout = dropout),
FeedForward(dim, mlp_dim, dropout = dropout)
]))
def forward(self, x):
for attn, ff in self.layers:
x = attn(x) + x
x = ff(x) + x
return self.norm(x)
class ViT(nn.Module):
def __init__(self, *, image_size, patch_size, num_classes, dim, depth, heads, mlp_dim, pool = 'cls', channels = 3, dim_head = 64, dropout = 0., emb_dropout = 0.):
super().__init__()
image_height, image_width = pair(image_size)
patch_height, patch_width = pair(patch_size)
assert image_height % patch_height == 0 and image_width % patch_width == 0, 'Image dimensions must be divisible by the patch size.'
num_patches = (image_height // patch_height) * (image_width // patch_width)
patch_dim = channels * patch_height * patch_width
assert pool in {'cls', 'mean'}, 'pool type must be either cls (cls token) or mean (mean pooling)'
self.to_patch_embedding = nn.Sequential(
Rearrange('b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1 = patch_height, p2 = patch_width),
nn.LayerNorm(patch_dim),
nn.Linear(patch_dim, dim),
nn.LayerNorm(dim),
)
self.pos_embedding = nn.Parameter(torch.randn(1, num_patches + 1, dim))
self.cls_token = nn.Parameter(torch.randn(1, 1, dim))
self.dropout = nn.Dropout(emb_dropout)
self.transformer = Transformer(dim, depth, heads, dim_head, mlp_dim, dropout)
self.pool = pool
self.to_latent = nn.Identity()
self.mlp_head = nn.Linear(dim, num_classes)
def forward(self, img):
x = self.to_patch_embedding(img)
b, n, _ = x.shape
cls_tokens = repeat(self.cls_token, '1 1 d -> b 1 d', b = b)
x = torch.cat((cls_tokens, x), dim=1)
x += self.pos_embedding[:, :(n + 1)]
x = self.dropout(x)
x = self.transformer(x)
x = x.mean(dim = 1) if self.pool == 'mean' else x[:, 0]
x = self.to_latent(x)
return self.mlp_head(x)